英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
毕业论文(设计)
外文翻译
题 目 基于智能控制的直流电机PWM调速
基于智能控制的直流电机PWM调速
Wenbin Yana, Dada Wangb, Pengfei Jiac, Weiguo Lic,a*
aGraduate Workstation of North China Electric Power University amp; Yunnan Power Grid Corporation,Kunming,650217,China
bYunnan Electric Power Test amp; Research Group CO,LTD Electric Power Research Institute,Kunming,650217,China
cNorth China Electric Power University,Beijing,102206,China
摘要
讨论了基于智能控制的直流电机PWM调速。 在建立了受控对象的数学模型之后,使用SIMULINK进行仿真。 本文介绍了直流电机的PWM双极驱动,设计了模糊控制器和中性网络控制器,并讨论了人工智能在直流电机调速中的应用。
关键词:直流电动机调速; PWM双极调速; 模糊PID控制; 中性网络控制
- 简介
直流电动机由于其良好的启动和断开性能以及易于控制的速度调节,广泛应用于冶金,机械制造和轻工业。 近年来,随着电力电子技术的发展,晶闸管整流器常用于直流电动机的供电,取代了交流电动机 - 直流发电机供电系统。 但直流电机调速系统是一个复杂的多变量非线性控制系统,由于各种参数相互影响,抗干扰能力弱,不适合高控制性能场合。
因此,为了提高直流电机速度控制系统的抗干扰性和鲁棒性,提高调速系统的响应速度和稳定精度,本文讨论了基于模糊控制神经网络控制的PWM直流电机调速系统。
- DC电机速度控制系统仿真模型
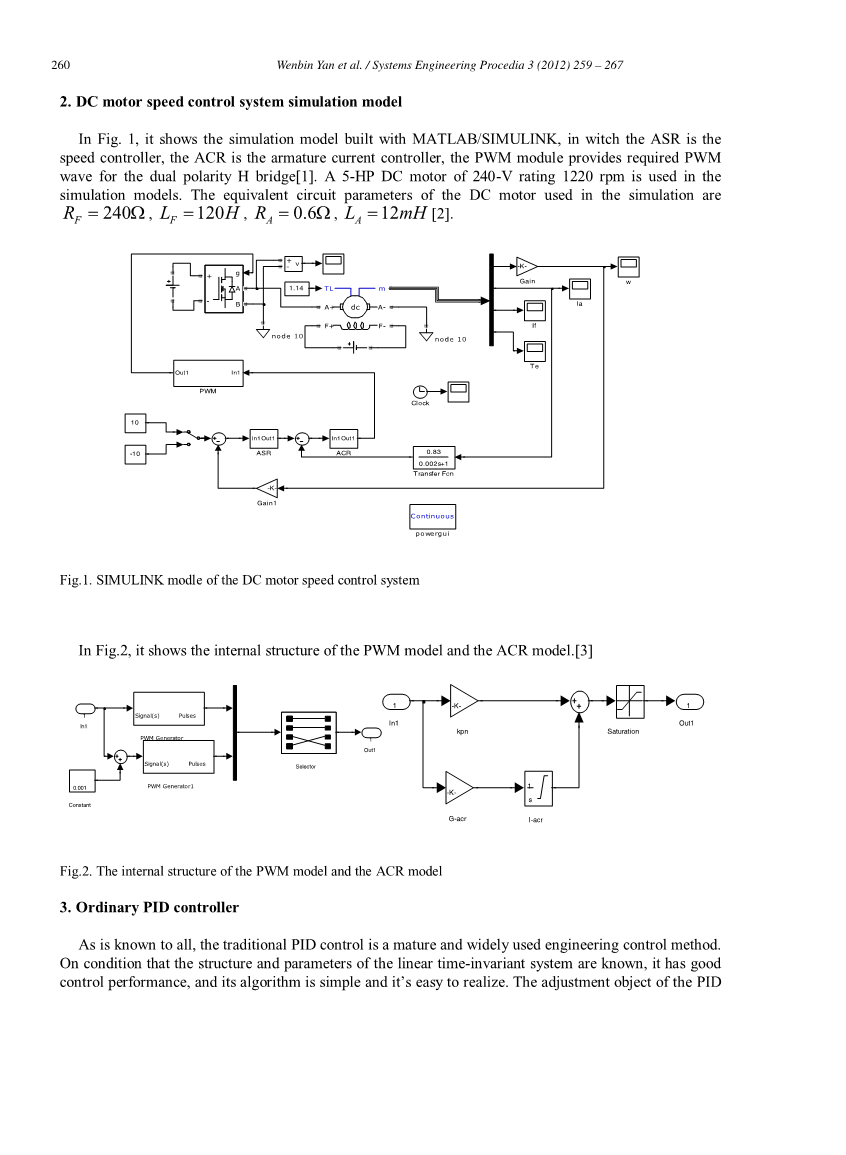
在图1中,它显示了用MATLAB / SIMULINK建立的仿真模型,其中ASR是速度控制器,ACR是电枢电流控制器,PWM模块为双极性H桥提供所需的PWM波[1]。 在仿真模型中使用240V额定值1220 rpm的5-HP直流电机。模拟中使用的直流电动机的等效电路参数是
RF 240 , LF 120H , RA 0.6 , LA 12mH [2]
图1 直流电机调速系统的SIMULINK模型
在图2中,它显示了PWM模型和ACR模型的内部结构。[3]
图2 PWM模型和ACR模型的内部结构
1
-K-
1
1
In1
In1
Out1
kpn Saturation
PWM Generator
1
Out1
Selector
0.001
PWM Generator1
1
-K-
s
Constant
Pulses
Signal(s)
Pulses
Signal(s)
- 普通PID控制器
众所周知,传统的PID控制是一种成熟且广泛使用的工程控制方法。 在已知线性时不变系统的结构和参数的条件下,具有良好的控制性能,算法简单,易于实现。PID控制器的调整对象是系统误差,它是一种尺度,积分,微分调整规则,其方程式为:
在等式中,KP,KI,KD是PID控制器的参数,e(t)是控制器的偏差输入信号,u(t)是控制信号。 在图3中,它显示了普通的模拟模型PID控制器。
1
In1
-K-
1
Out1
kpn
-K-
1
s
图3 普通PID控制器的仿真模型
- 模糊控制器
模糊控制是一种基于模糊集理论,模糊语言变量和模糊逻辑的计算机智能控制。 基本概念由着名的L.A.Zadeh教授提出。 经过20多年的发展,它在模糊控制理论中取得了巨大的成功。
模糊控制器也称为模糊逻辑控制器。 由于模糊控制规则是由模糊理论的模糊条件陈述描述的,它是一种语言控制器,因此也称为模糊语言控制器。[4]
模糊控制器的组成如图4所示:
图4模糊控制器的组成
-
- Fuzzification接口
模糊控制器输入的模糊化很重要,因此它可以用来求解控制输出,因此它实际上是模糊控制器的输入接口。 它的主要作用是将真正的定量放入模糊向量中。 在这种情况下,它是一个单变量2D模糊控制器。 误差E,误差率EC和控制量u的模糊集描述为:
e NB,,NM,,N,S ,Z PS PM PB
The domain of discourse of E and EC is: 3,-2,-1,0,1,2,3
The domain of discourse of u is: 4.5,-3,-1.5,0,1.5,3,4.5
-
- 知识基础
Knonledge基础由数据库和规则库组成。 数据库包含所有输入和输出变量的模糊子集的所有隶属度矢量值。 如果域是连续域,则它是隶属函数。 在求解规则推理的模糊关系方程时,它为推理机提供数据。
规则库包含模糊控制的所有规则。 在推理中,它为推理机提供控制规则。 规则的数量与模糊变量的模糊子集划分有关。 模糊子集越多,规则越多,但并不表示规则库的准确性更高。 规则库的准确性还与专家知识的准确性有关。
-
- 推理
在模糊控制中,推理是利用输入模糊量和模糊控制规则完成模糊推理,求解模糊关系方程,得到模糊控制量的部分。 在模糊控制中,考虑到推理时间,通常使用简单的推理方法。
模糊规则表(表1)可以描述模糊控制规则,模糊规则有49个,各种模糊语句之间的关系是或。
上表显示的模糊规则可表示如下:
R1:如果E是NB而EC是NB,那么U是PB
R2:如果E是NB而EC是NS,则U是PM
|
e |
||||||||
|
u |
NB |
NM |
NS |
Z |
PS |
PM |
PB |
|
|
ec |
||||||||
|
NB |
PB |
PB |
PM |
PM |
PS |
Z |
Z |
|
|
NM |
PB |
PB |
PM |
PM |
PS |
Z |
ZS |
|
|
NS |
PM |
PM |
PM |
PS |
Z |
NS |
NS |
|
|
Z |
PM |
PM |
PS |
Z |
NS |
NM |
NM |
|
|
PS |
PS |
PS |
Z |
NS |
NS |
NM |
NM |
|
|
PM |
PS |
Z |
NS |
NM |
NM |
NM |
NB |
|
|
PB |
Z |
Z |
NM |
NM |
NM |
NB |
NB |
|
表1.模糊规则表
基本结构可以简化为如果 A和B然后C,其中A是域U的模糊子集,B是域V的模糊子集。根据控制经验,控制决策表R可以离线组织 .R是笛卡尔积U UV的模糊子集。 在一瞬间,它的控制体积由下式给出:
C ( A B) R
在等式中,X -- 模糊直接产品操作
。- -模糊合成操作
-
- 去模糊化
得到结果后,模糊控制的推理已经完成。 但是,目前所获得的结果仍然是模糊向量,不能直接用作控制量。 因此,必须对结果进行转换,以便获得清晰的输出。 这个过程就是去模糊化。 通常,具有转换功能的输出部分称为解模糊化接口。
为了获得准确的控制量,需要模糊方法来表示隶属函数的计算输出。 在本文中,使用加权平均方法。 对于域上的每个元素,xi(i=1,2,....,n),它被用作输出模糊集合隶属度u(i)的加权因子,即取得产品 xiu(i),然后计算产品和成员的总和,然后计算如下:
平均值x。是通过加权平均法获得的模糊集的所需输出。 最后,输出x。乘以定量因子以满足控制要求。 然后获得控制体积的实用值。
在图5和图6中,它显示了模糊PID控制器的SIMULINK模型和模糊控制规则,以及误差E,误差变化率EC和控制量u的模糊隶属函数图。
图5 模糊PID控制器的仿真模型
图6:误差E的模糊隶属函数gragh,误差变化率EC和控制量u
- 神经网络控制器
神经网络控制是20世纪80年代发展起来的自动控制领域的前沿课题之一。 它是智能控制的一个新分支,为解决复杂的非线性,不确定和未知系统的控制问题开辟了新的途径。
单神经元自适应智能PID控制器由具有自学习和自适应能力的单神经元组成,不仅结构简单,而且能适应环境的变化。 它还具有很强的鲁棒性。 PID控制需要调整三种控制效果,包括尺度,积分和微分,以形成坐标和相互依赖的关系,以获得良好的控制效果。 这种关系不是简单的线性组合,它可以从非线性最优关系的无限变化组合中形成最佳关系。 神经网络具有任意的非线性能力,通过学习系统的性能可以实现PID控制的最佳组合。[5]
神经元的学习规则:没有监督Hebb学习规则,监督Delta学习规则和监督Hebb学习规则。 单神经元自适应控制器通过加权系数的调整实现其自适应和自组织功能,权重系数调整的实现是根据监督Hebb学习规则实现的。 控制和学习算法是:
<!--
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[19689],资料为PDF文档或Word文档,PDF文档可免费转换为Word

