英语原文共 4 页,剩余内容已隐藏,支付完成后下载完整资料
微波雨量计传感器的设计考虑和信号处理
摘要:以前的工作已经验证了一种微波雨量计的概念,其工作原理如下:使用微波多普勒运动传感器,测量由下落的雨滴产生的多普勒频移。然后可以将相应的下落速度与降雨率联系起来。然而,现有的多普勒运动传感器在几个方面都存在不足。在这里,我们将讨论与基于微波的雨量计相关的重要电子设计和信号处理注意事项。
关键词 雷达、耿氏二极管模块、DRO、降雨
一、引言
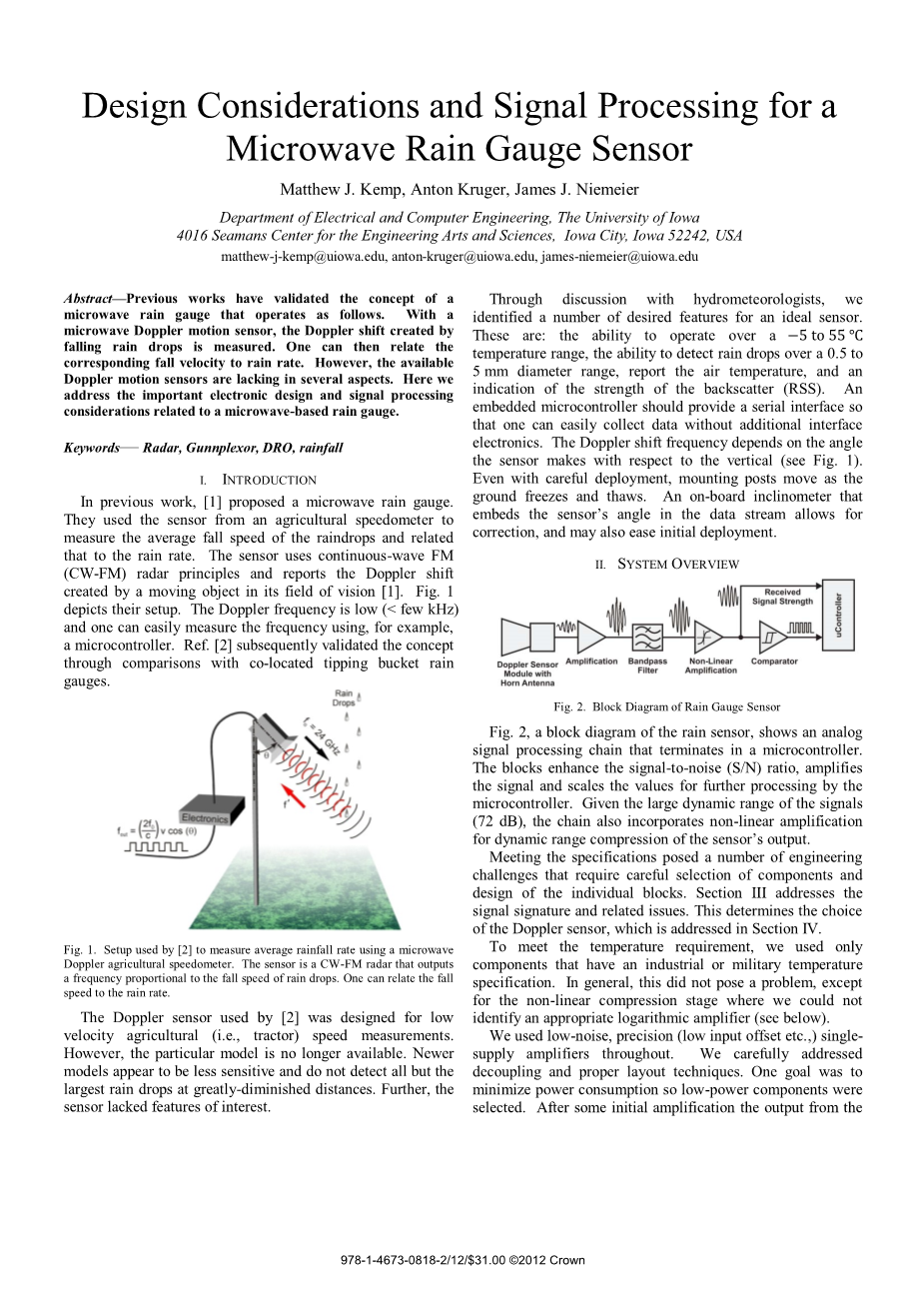
在以前的工作中,[1]提出了一种微波雨量计。他们使用来自农业速度计的传感器来测量雨滴的平均下落速度,并将其与降雨率联系起来。该传感器使用连续波FM(CW-FM)雷达原理,并报告视野中移动物体产生的多普勒频移 [1]。图1描述了它们的设置。多普勒频率很低(大约lt;几kHz),可以使用微控制器等工具轻松测量频率。[2]随后通过与位于同一地点的翻斗式雨量计的比较验证了这一概念。
图1. [2] 使用微波多普勒农业测速仪测量平均降雨量的设置。该传感器是一种CW-FM雷达,其输出频率与雨滴的下落速度成比例。可以把下降速度与降雨量联系起来。
[2]使用的多普勒传感器设计用于低速农业(即拖拉机)速度测量。然而,这种特殊型号已不复存在。目前所用的型号不那么敏感并且在距离大大缩短的情况下只能探测最大的雨滴。另外,传感器也缺乏吸引的特性。
通过与水文气象学家的讨论,我们确定了理想传感器的许多理想特征。它们是:在-5至55℃温度范围内运行的能力、在0.5至5毫米直径范围内检测雨滴的能力、报告气温以及后向散射 (RSS)强度指示的能力。嵌入式微控制器应提供串行接口,以便无需额外的接口电子设备即可轻松收集数据。多普勒频移取决于传感器相对于垂直方向的角度(见图1)。即使仔细部署,安装柱也会随着地面冻结和融化而移动。车载倾斜仪将传感器的角度嵌入数据流中,可以进行校正,也可以简化初始设置。
二、系统概述
图2. 雨量计传感器框图
图2是雨量传感器的框图,显示了终止于微控制器的模拟信号处理链。这些模块提高了信噪比(S/N),放大了信号并缩放了值以供微控制器进一步处理。鉴于信号的大动态范围(72dB),该链还结合了非线性放大,用于传感器输出的动态范围压缩。
为了满足规范,我们需要克服许多工程挑战,需要仔细选择组件和设计各个模块。第三节讨论了信号特征和相关问题。这决定了多普勒传感器的选择,这将在第四节中讨论。
为了满足温度要求,我们仅使用具有工业或军用温度规格的组件。一般来说,这不会造成问题,除了我们无法识别合适的对数放大器的非线性压缩阶段(见下文)。
我们始终使用低噪声、精密(低输入偏移等)单电源放大器。我们仔细解决了去耦和适当的布局技术。一个目标是尽量减少功耗,因此选择了低功耗组件。经过一些初始放大后,多普勒传感器的输出经过带通滤波。截止频率是根据多普勒传感器的载波频率选择的,总结在表1中。
图2中的比较器用作具有200mV滞后的施密特触发器。它将信号转换为方波。微控制器(ATmega128)测量频率并提供串行(RS232)接口。微控制器使用其板载ADC来确定RSS。
三、信号表征
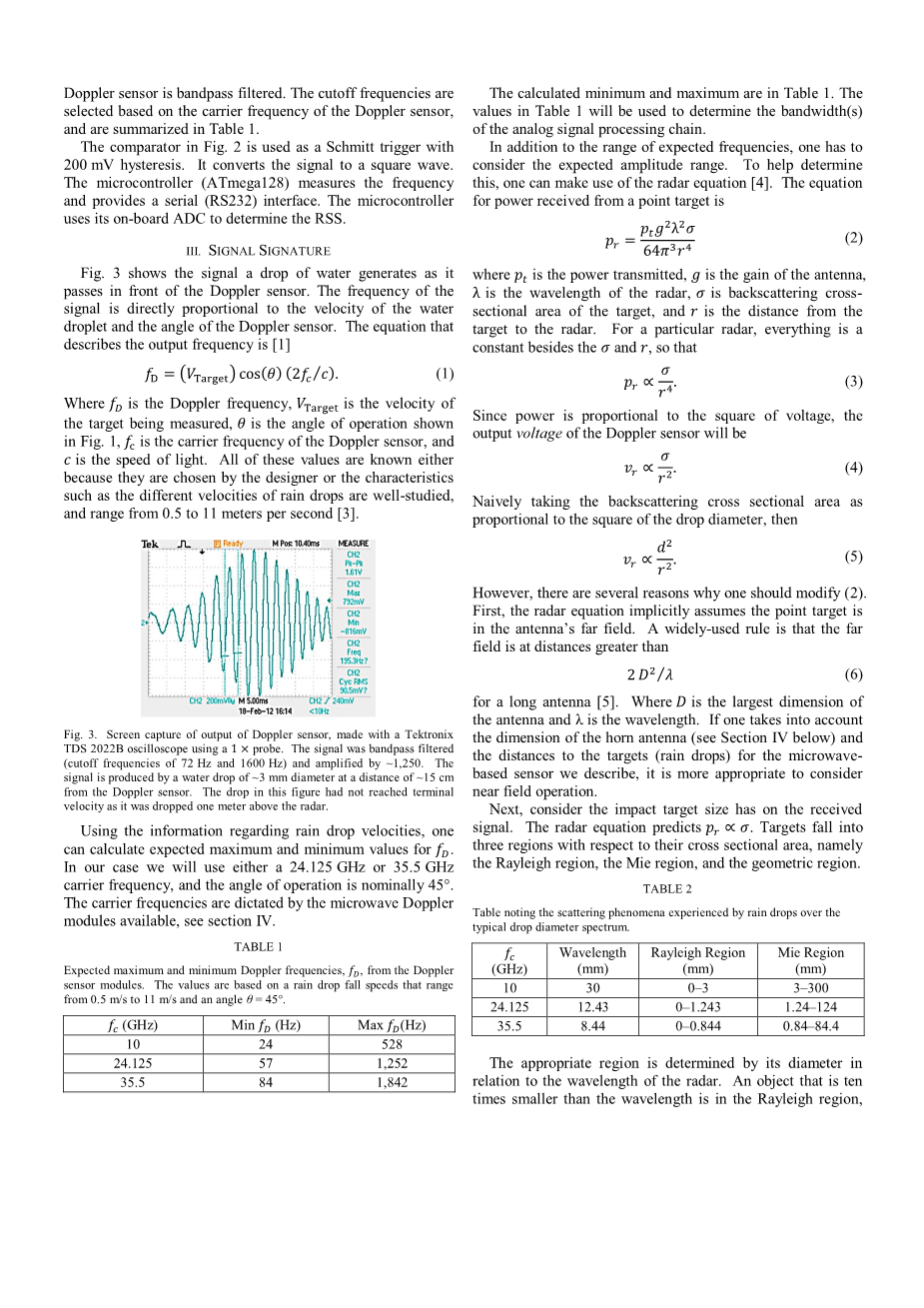
图3显示了水滴通过多普勒传感器前所产生的信号。信号的频率与水滴的速度和多普勒传感器的角度成正比。描述输出频率的方程为[1]
图3.使用Tektronix TDS 2022B示波器和 1 times; 探头制作的多普勒传感器输出屏幕截图。信号经过带通滤波(截止频率为72Hz和1600Hz)并放大约1,250。信号由距离多普勒传感器约15厘米处的直径约3毫米的水滴产生。该图中的下降没有达到最终速度,因为它下降到雷达上方一米处。
D=(Target)cos()(2c/c) (1)
其中D是多普勒频率,Target是被测目标的速度,是图1所示的工作角度,c是多普勒传感器的载波频率,c是光速。所有这些数值都是已知的,要么是因为它们是由设计师选择的,要么是因为对雨滴的不同速度等特征进行了充分研究,其范围为每秒0.5到11米[3]。
使用有关雨滴速度的信息,可以计算的预期最大值和最小值。在我们的例子中,我们将使用24.125GHz或35.5GHz载波频率,并且工作角度标称为45°。载波频率由可用的微波多普勒模块决定,见第四节。
表一
来自多普勒传感器模块的预期最大和最小多普勒频率。这些值基于范围从0.5m/s到11m/s的雨滴下落速度和角度theta;= 45°
计算出的最小值和最大值在表1中。表1中的值将用于确定模拟信号处理链的带宽。
除了预期的频率范围之外,还必须考虑预期的幅度范围。为了帮助确定这一点,可以利用雷达方程 [4]从点目标接收的功率方程为
(2)
其中是发射的功率,是天线的增益,lambda;是雷达的波长,是目标的后向散射截面积,是目标到雷达的距离。对于一个特定的雷达,除了和之外都是常数,所以
(3)
由于功率与电压的平方成正比,因此多普勒传感器的输出电压为
(4)
自然地将后向散射横截面积与液滴直径的平方成正比,那么
(5)
但是,有几个原因应该修改 (2)。首先,雷达方程隐含地假设点目标位于天线的远场。一个广泛使用的规则是远场的距离大于
2 (6)
对于长天线[5]。其中'是天线的最大尺寸,lambda;是波长。如果考虑到喇叭天线的尺寸(见下文第四节)和我们描述的基于微波的传感器到目标(雨滴)的距离,它更适合考虑近场操作。
表二:
表中记录了雨滴在典型水滴直径光谱上所经历的散射现象。
接下来,考虑目标大小对接收信号的影响。雷达方程预测。目标的横截面积分为三个区域,即瑞利区域、米氏区域和几何区域。
适当的区域由其与雷达波长相关的直径决定。比波长小十倍的物体在瑞利区域,大小与波长相似的物体在米氏区域,比波长大十倍的物体在几何区域 [5]。表2显示了不同的兴趣载波频率所期望的区域。
显然,对于雨量计将运行的降雨和微波频率,散射位于瑞利或米氏区域。在Mie区域,物体的雷达横截面大于其几何横截面积,而在瑞利区域,物体的雷达横截面小于几何横截面积 [5]。
由于微波雨量计工作在多个散射区域并且工作在雷达的近场,因此无法使用 (5) 可靠地估计来自传感器的预期电压范围。因此,我们通过实验确定了接收功率关系。
图4.多普勒传感器接收到的平均功率与目标距离的关系图。数据是通过在距传感器设定的距离处掉落直径为3mm的金属球并平均接收到的峰值功率来收集的。该图表明是由雷达方程预测而不是。要注意的是,对应于传感器电压的。
图4显示了接收信号与目标距离的关系,这是通过在多普勒传感器前面不同距离放置金属球得到的。图5显示了RSS与液滴直径的结果。
图5.多普勒传感器接收到的平均功率与目标大小的关系图。数据是通过在距离多普勒传感器15.25厘米处反复掉落不同尺寸的金属球,并平均计算接收到的峰值功率来得到的。图表得出了。请注意,对应于传感器电压的。
数据表明对数据的建模相当好,这与 (5)不同。数据还显示了,其中是目标的直径,很好地模拟了接收器信号与目标直径的关系。
结合实验结果求出离雷达的距离和落差直径,得出了
(7)
其中是一些常数,它是多普勒传感器模块的函数,例如天线增益、发射功率、放大率等。
使用这一信息和雨滴直径的预期范围,可以估计多普勒传感器预期产生的最大和最小峰峰值 (Pk-Pk)电压。这是计算得出的,可以在下面的表3中看到,该表显示72-dB的动态范围。表3中提供的数据是初始放大阶段为避免削波而可能获得的增益量以及所需压缩量的控制因素。
表三
由典型多普勒传感器模块产生的估计Pk-Pk电压水平。使用下降直径和距雷达距离的幂律关系以及使用图3中的1,250 归一化的Pk-Pk电压计算的值。
四、多普勒传感器模块
多普勒传感器模块的选择在随后的电路中起着重要作用;出于这个原因,我们研究了几个模块。这些模块涵盖了不同的载波频率、不同的振荡器结构和不同的天线。最大的担忧是实现高信噪比和增加最小多普勒频率。
我们检查的载波频率是X波(~10GHz)、K波段(~24GHz)和Ka波段(~35GHz)。如前所述,载波频率直接决定了预期多普勒频率的范围。例如,考虑一个标称工作频率=10GHz的X波段模块。最小预期多普勒频率,发生在具有0.5m/s量级的下降速度的小液滴中。假设传感器安装在45°,这意味着
(8)
类似的计算表明预期的最大值为528Hz。不幸的是,雷达模块很容易受到60Hz电源的拾取和干扰。由于绝大多数雨滴很小且下落速度较小,因此它们对应的多普勒频率更接近60Hz,而不是528Hz。过滤以去除60Hz干扰也会去除所需的多普勒信号。
因此,最好使用在更高频率下工作的模块,因为这会将最低的干扰移至60-Hz之上,并且无需复杂的方案即可滤除60Hz的噪声。如表1所示,工作在35.5GHz的Ka波段雷达是理想的。更高的频率可能是效果更好的,但随着载波频率的增加,电磁波的衰减也会增加。
我们研究了两种不同类型的雷达模块,即基于介质谐振器振荡器 (DRO)的模块和基于耿氏二极管的模块。一些模块如图6 所示。与耿氏二极管模块相比,DRO的一些优点是它们更紧凑,其载波频率对温度的依赖性更小。然而,我们能够获得的DRO模块位于PCB基板上,并与贴片天线集成在一起。这些集成天线具有广泛的辐射模式。耿氏二极管模块设计用于连接到波导或天线。这使得连接高增益定向天线(如喇叭和锥形天线)变得容易。由于没有高增益天线的低信噪比,很难满足设计规范。
出于这些原因,我们选择了工作在Ka波段 (35.5GHz)的多普勒传感器模块。它的辐射功率为10mW。该模块配备了镜头校正喇叭天线,估计增益为20dB。
图6. 探索用于雨量计传感器的多普勒传感器模块集合。从左到右,X波段DRO、带有锥形喇叭天线的X波段耿氏二极管模块、带有锥形喇叭天线的K波段耿氏二极管模块和带有镜头校正喇叭天线的Ka波段耿氏二极管模块。
五、非线性放大
正如我们前面所讨论的,信号的动态范围相当大:大约72dB。如果为最小信号设计增益,则较大的信号会削波和失真,而如果为最大信号设计增益,则会丢失较小的信号。因此,需要某种动态范围压缩。
我们研究了许多标准自动增益控制 (AGC)方案,包括对数放大器。然而AGC并不适用,因为这些方案旨在随着信号电平缓慢波动而调整增益,并且时间常数通常为500ms或更长。然而,微波雨量计的信号电平是逐滴波动的,时间尺度是几百微秒。简单地改变AGC设计的时间常数是行不通的,并且会导致不稳定或简单地将放大器增益设置为某个平均值。我们还研究了对数放大器IC,但其中许多器件会产生信号的对数包络而不是信号的瞬时对数,在这种情况下会丢失信号的频率。还有一些对数放大器不满足温度要求,等等。
图7显示了一个运行良好的简单解决方案。可以证明这样连接的两个二极管表现出以下非线性关系 [7]
(9)
在这里,和分别是通过对的电流和电压,是反向漏电流,是二极管的热电压。人们可以使用它来构建一个非线性电阻器并将其合并到一个分压器中。如果设计得当,这样的分压器会衰减大信号,但不会衰减小信号。所示电路将最大电压限制为大约二极管的正向电压。可以通过串联添加二极管来增加限制。市场上有许多二极管阵列。这种二极管位于同一基板上,具有紧密匹配的特性。
图7.非线性增益级示意图及其电压电流特性。
六、 未来工作
在此,我们解决了与基于微波的雨量计相关的一些工程问题。但是,要成为一种可行的仪器,还必须解决将传感器安装在坚固、防水的外壳中的问题。之后,我们计划进行广泛的实地考察,并与位于同一地点的翻斗式仪表进行比较。然后,我们预计将许多此类基于微波的雨量计集成到爱荷华州不断增长的环境传感器网络中。
致谢
作者要感谢IIHR-水文科学与工程的爱荷华洪水中心为本项目提供的支持和需求。
参考文献
lt;
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[591259],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、文献综述、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。

